在自动驾驶汽车(AV)系统中采用蓝牙(Bluetooth)和超宽带(UWB)等短距离射频技术,有助于保护弱势道路使用者(VRU)。
尽管有关自动驾驶亮相街头的报导经常出现在媒体头条,但要真正落实这一步仍然任重而道远。其中,缺少足以保护弱势道路使用者的技术格外重要。当今大多数所谓的“自动驾驶”汽车充其量也只能提供美国汽车工程师学会(Society of Automotive Engineer,SAE)定义的“辅助驾驶”,还称不上是真正的“自动驾驶”。也就是说,无论何时,车辆的操控者都是坐在驾驶座的驾驶人,就算启动了驾驶辅助系统也不例外。为了升级到自动驾驶领域—SAE J3016自动驾驶分级标准(SAE J3016 Levels of Driving Automation Scale)中的3-5级(Level 3-5),车辆必须在某些情况下实现完全自主操控。这意味着在当今驾驶辅助功能的基础上,还必须向前迈出很大的一步。Level 3及其更高等级的自动驾驶技术一直未能像驾驶辅助技术那样快速地取得明显进展。其中,原因之一在于不断变化的监管环境,其次则是技术还有待发展成熟,以便能在更广泛的场景中支持自动驾驶。
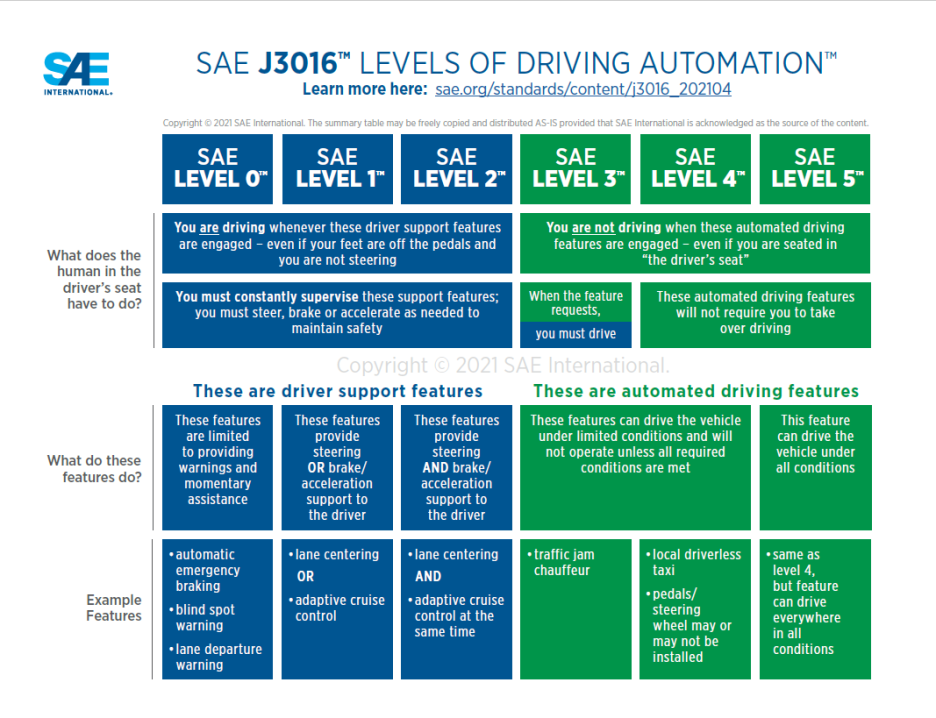
SAE J3016自动驾驶分级标准。(图片来源:SAE International)
监管基础
《维也纳道路交通公约》(Vienna Convention on Road Traffic)的修订,为实现更高等级的自动驾驶奠定了基础。如果管理自动驾驶汽车的监管架构进展顺利,那么预计在未来几年将可看到许多此类架构涌现,特别是SAE分级标准中有关Level 3和Level 4的功能架构。事实上,早在2022年初,美国高速公路安全保险协会(Insurance Institute for Highway Safety,IIHS)就宣布针对部分自动化车辆的评级计划。诸如此类的进展大幅提高了自动驾驶的确定性,从而推动加快创新步伐,以应对技术挑战。
提高自主能力范围
目前,围绕着更高度自动化等级所展开的大部分研发(R&D)任务关注的都是高速公路驾驶。相对而言,这是最简单的公共道路环境之一,导航过程中不涉及绕路或弯道等复杂设计。在正常情况下,这类道路环境也没有行人、摩托车或自行车,也就是说不会出现任何类型的弱势道路使用者。
城区环境的自主性
城市地区的情况则全然不同,部分原因在于道路设计更加复杂,另一部分原因则是此类环境中弱势道路使用者的数量和类型更多且日益增加。从汽车厂商的角度来看,保护弱势道路使用者极具挑战性。大多数弱势道路使用者的行动都有着突发以及不可预测的特性,因此,即使采用目前较高水平的自动化车辆中所搭载的技术,也很难做到完全检测和准确识别。例如,摄像头受限于视线(LoS)范围,因而可能无法检测到正从停着的货车后方步入车道的行人。对于自动化能力达到Level 3以及更高等级的车辆来说,为了达到在城市中安全自动驾驶的要求,针对弱势道路使用者的检测能力必须有大幅进展。然而,没有单一技术本身就足以达到要求,其关键在于使用多项互补技术。例如,目前以激光雷达(LiDAR)辅助车载摄像头的相关工作已经在展开中。然而,在保护弱势道路使用者方面,目前尚未取得重大进展的是短距离射频技术的使用,尤其是蓝牙和UWB技术。
 自动驾驶汽车系统中所使用的蓝牙和UWB等短距离射频技术有助于保护弱势道路使用者。(图片来源:u-blox)
自动驾驶汽车系统中所使用的蓝牙和UWB等短距离射频技术有助于保护弱势道路使用者。(图片来源:u-blox)
蓝牙和UWB:技术发展成熟
根据u-blox最近进行的一项研究显示,使用短距离无线测距技术可望在都市中补充增强全球导航卫星系统(GNSS)的高精度车辆定位能力,而延伸这项技术将可用于保护弱势道路使用者。如今几乎每一款新车、智能手机和可穿戴设备中都内置了蓝牙功能;而由于蓝牙模块成本低廉,因此可以轻松集成于其他尚不具备蓝牙功能的产品中,例如自行车、电动自行车与电动滑板车等微型交通工具。UWB也日益发展壮大,目前已经开始出现在智能手机中,并有部分车厂采用UWB技术来实现无钥匙进入(keyless entry)等应用。
短距离射频技术工作原理
那么,蓝牙或UWB的弱势道路用户检测系统如何运作?需要进行哪些进一步的研发,才能在未来的车辆自动驾驶功能中融合这些技术?为了让支持蓝牙或UWB的检测系统发挥作用,弱势道路使用者必须随身携带、在自身附近或在车辆上使用特定的标签,例如内置于智能手机或手表的标签。这些标签会定期发出信号,让附近的自动驾驶汽车能够计算与弱势道路用户之间的距离与信号发出的角度。这种解决方案的前景广阔,但其适合的应用领域还有待拓展。
挑战一:建立数据可信度
首先,蓝牙或UWB测距系统发出的各项数据对于车辆决策应该有多大的影响?弱势道路使用者可能在不断移动中,因此决策系统必须理解弱势道路用户传来的数据可信度,并据此判断其不确定性。随后还要考虑如何将这些数据与来自其他系统的数据相互整合,以及如果有冲突该怎么办。业界需要建立一套鲁棒的流程和度量,以评估蓝牙和UWB测距信息的完整性。这涉及发展统计学的方法,更深入地评估射频信号在不同场景的情况。创建这些模型可望让系统发现异常值,并为其采集到的每一次读数附加确定性或可信度评分。这有助于车辆控制系统据此评估每个数据点可能带来的影响。
挑战二:防范恶意入侵者
遗憾的是,当恶意入侵者企图瘫痪自动驾驶汽车的安全系统时,往往会造成无法挽回的伤害和损失。因此,关键在于打造足够强大的防碰撞功能,从而保护车辆周围和车辆内部人员的安全。在这方面,UWB有着内在优势,能够进行安全的距离测量,而不易于受到中间人攻击(MITM)的影响。因此,UWB测距的可信度高于蓝牙和其他传统技术。但无论采用哪种技术,防范恶意入侵者至关重要。因此,必要时还得配合采用验证、合理性检查以及不当行为检测等多种安全措施。另一项举措则是将恶意攻击的特征集成到前述信号模型中,从而加强车辆控制系统检测攻击并确定应对方法的能力。如同上述的建议,为了抵御企图破坏车辆防碰撞系统的攻击,另一项关键要素是同时采用多种技术。同时对多个车内系统发起攻击的复杂度,远远超过针对一套系统的攻击,因此这种冗余配置有助于大幅提高安全保障等级。
挑战三:隐私保护
任何追踪个人行踪的行为都会引发隐私方面的顾虑——正如疫情初期政府试图以人们的智能手机追踪新冠密接。现有的解决方案能够实现数据的分散化和匿名性,但在保护个人信息方面还有待加强,同时还要确保个人对其共享内容、共享对象以及数据用途保有控制权。
挑战四:未携带标签的弱势道路使用者
大多数青少年和成年人都随身携带智能手机或智能手表,因此可通过蓝牙或UWB掌握其行踪,但仍然有一部分幼童或老年人等弱势道路使用者并不一定会随时携带此类设备。这进一步反映出利用多种技术融合以避免碰撞与防范交通事故的重要性。单纯用于自动驾驶汽车进行识别的个人保护标签也可能成为一种新兴趋势,包括低功耗蓝牙和UWB可穿戴设备,都可用于在行人出现时通知附近的自动驾驶。
挑战五:易用性与集成
最后,蓝牙和UWB技术还需要进一步拓展其适合的应用领域。其关键要求包括降低成本、简化部署、提高可用性,以及使其更适于集成至生态系统中。
创新时机成熟
正如文中所述,为了保护弱势道路使用者,未来的自动驾驶汽车需要更先进的系统,而这就需要设计者能以全新方式融合先进科技,以提供卓越的安全水平。蓝牙和UWB在定位测距方面展现巨大的前景,并且已经用于汽车的其他用途。因此,在打造更安全的未来车辆以及解锁更高等级的自动驾驶时,蓝牙和UWB技术及其商机指日可待。





